Simply final month, Oslo, Norway-based 1X (previously Halodi Robotics) introduced an enormous $100 million Sequence B, and clearly they’ve been placing the work in. A brand new video posted final week reveals a [insert collective noun for humanoid robots here] of EVE android-ish cell manipulators doing all kinds of duties leveraging end-to-end neural networks (pixels to actions). And better of all, the video appears to be roughly an sincere one: a single take, at (appropriately) 1X velocity, and full autonomy. However we nonetheless had questions! And 1X has solutions.
If, like me, you had some essential questions after watching this video, together with whether or not that plant is definitely useless and the destiny of the weighted companion dice, you’ll wish to learn this Q&A with Eric Jang, Vice President of Synthetic Intelligence at 1X.
IEEE Spectrum: What number of takes did it take to get this take?
Eric Jang: About 10 takes that lasted greater than a minute; this was our first time doing a video like this, so it was extra about studying coordinate the movie crew and arrange the shoot to look spectacular.
Did you practice your robots particularly on floppy issues and clear issues?
Jang: Nope! We practice our neural community to select up all types of objects—each inflexible and deformable and clear issues. As a result of we practice manipulation end-to-end from pixels, choosing up deformables and clear objects is way simpler than a classical greedy pipeline, the place it’s important to work out the precise geometry of what you are attempting to understand.
What retains your robots from doing these duties quicker?
Jang: Our robots study from demonstrations, in order that they go at precisely the identical velocity the human teleoperators display the duty at. If we gathered demonstrations the place we transfer quicker, so would the robots.
What number of weighted companion cubes had been harmed within the making of this video?
Jang: At 1X, weighted companion cubes don’t have rights.
That’s a really cool methodology for charging, however it appears much more difficult than some sort of drive-on interface instantly with the bottom. Why use manipulation as a substitute?
Jang: You’re proper that this isn’t the best approach to cost the robotic, but when we’re going to succeed at our mission to construct typically succesful and dependable robots that may manipulate all types of objects, our neural nets have to have the ability to do that process on the very least. Plus, it reduces prices fairly a bit and simplifies the system!
What animal is that blue plush imagined to be?
Jang: It’s an overweight shark, I feel.
What number of completely different robots are on this video?
Jang: 17? And extra which can be stationary.
How do you inform the robots aside?
Jang: They’ve little numbers printed on the bottom.
Is that plant useless?
Jang: Sure, we put it there as a result of no CGI / 3D rendered video would ever undergo the difficulty of including a useless plant.
What kind of existential disaster is the robotic on the window having?
Jang: It was imagined to be opening and shutting the window repeatedly (good for testing statistical significance).
If one of many robots was really a human in a helmet and a go well with holding grippers and standing on a cell base, would I be capable to inform?
Jang: I used to be tremendous flattered by this touch upon the Youtube video:
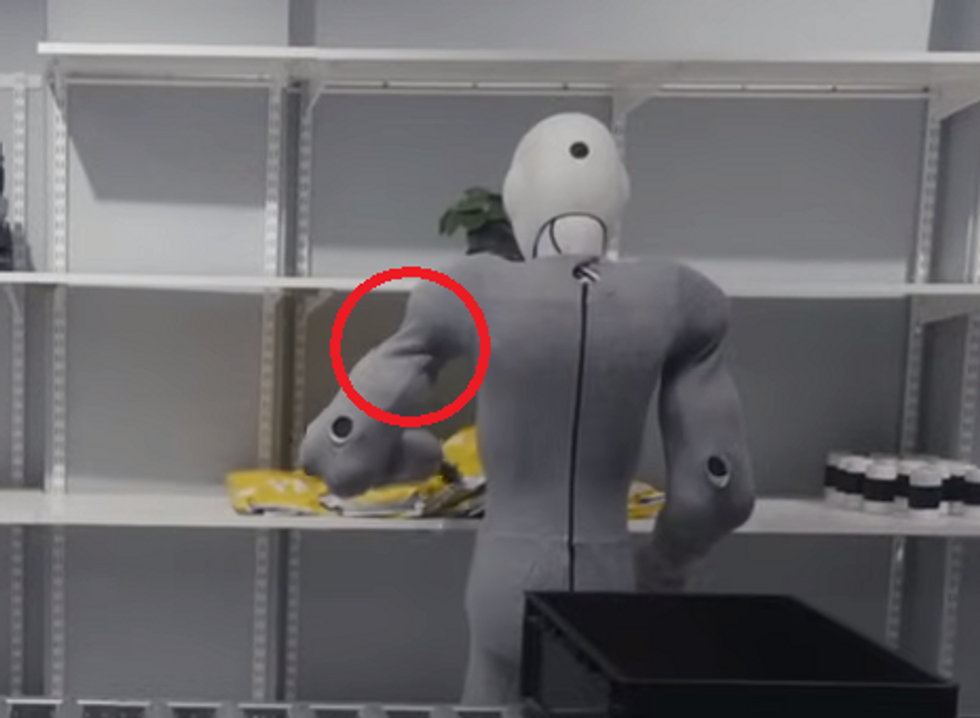
However in case you have a look at the realm the place the higher arm tapers on the shoulder, it’s too skinny for a human to suit inside whereas nonetheless having such broad shoulders:
Why are your robots so completely happy on a regular basis? Are you planning on doing extra advanced HRI stuff with their faces?
Jang: Sure, extra advanced HRI stuff is within the pipeline!
Are your robots capable of autonomously collaborate with one another?
Jang: Keep tuned!
Is the skew tetromino essentially the most troublesome tetromino for robotic manipulation?
Jang: Good catch! Sure, the inexperienced one is the worst of all of them as a result of there are a lot of legitimate methods to pinch it with the gripper and carry it up. In robotic studying, if there are a number of methods to select one thing up, it may well really confuse the machine studying mannequin. Type of like asking a automotive to show left and proper on the identical time to keep away from a tree.
Everybody else’s robots are making espresso. Can your robots make espresso?
Jang: Yep! We had been planning to throw in some espresso making on this video as an easter egg, however the espresso machine broke proper earlier than the movie shoot and it seems it’s not possible to get a Keurig Okay-Slim in Norway through subsequent day transport.
1X is at present hiring each AI researchers (imitation studying, reinforcement studying, large-scale coaching, and so forth) and android operators (!) which really appears like a brilliant enjoyable and attention-grabbing job. Extra right here.
From Your Web site Articles
Associated Articles Across the Net